AxEnd
AxEnd 

![]()
دوربین ردیابی هواپیماهای بدون سرنشین E/O دارای دوربین قابل مشاهده قابل مشاهده و دوربین تصویربرداری حرارتی است, با تشخیص هدف هوشمند و ردیابی الگو-ریتم, که می تواند به تشخیص و ردیابی هدف 24 ساعته در نور مرئی برسد, نور کم, آب و هوای شدید و شب. بدن پوسته ریخته گری آلیاژ با استحکام بالا را اتخاذ می کند, با سمپاش سه ضد قطعی کلی, عایق حرارتی, مقاومت در برابر درجه حرارت بالا و سرما, مقاومت در برابر ضربه, مقاومت در برابر خوردگی, و مقاومت باد خوب و عملکرد جذب شوک.
![]()
*توجه داشته باشید که ظاهر, مشخصات و عملکردها ممکن است بدون اطلاع قبلی متفاوت باشد.
| مدل | AXC-3K |
| دوربین نور قابل مشاهده | |
| حداکثر وضوح | 1080پ (1920×1080) |
| فاصله کانونی | 6.5 312mm 48x بزرگنمایی نوری |
| حداقل روشنایی | رنگ: 0.002لوکس سیاه و سفید: 0.0002لوکس @(AGC در) |
| نفوذ مه | نقص نوری |
| دوربین تصویربرداری حرارتی | |
| نوع ردیاب | آشکارساز هواپیمای کانونی اکسید وانادیوم بدون پوشش |
| وضوح تصویر | 640×512, رمزگذاری تصویربرداری حرارتی: 1280×1024 |
| فاصله کانونی لنزهای تصویربرداری حرارتی | 75میلی متر |
| تصویر ویدیویی | |
| استانداردهای فشرده سازی ویدیویی | H.265 /H.264/ MJPEG |
| نرخ فریم | 25/30فریم در ثانیه |
| پوشش شخصیت OSD | OSD هوشمند چند منطقه ای, از شخصیت های استاندارد ملی چند خط پشتیبانی می کند, اندازه قلم, رنگ, و موقعیت را می توان سفارشی کرد |
| تابع PTZ | |
| محدوده تشخیص | افقی: 0360 ° 360 درجه چرخش نامحدود; عمودی: -90° ~ +90 درجه |
| موقعیت از پیش تعیین شده | 256 |
| عملکرد تجهیزات و عملکردهای هوشمند | |
| عملکرد تشخیص هدف | نور مرئی ≥ 2.5 کیلومتر تصویربرداری حرارتی 1.2 کیلومتر (پهپاد 35x35cm , دید 20 کیلومتر, درجه حرارت 20 ℃, رطوبت 40%) |
| ویژگی های شبکه | |
| پروتکل های پشتیبانی شده | IPv4, TCP/IP, UDP, HTTP, DHCP, RTP/RTCP/RTSP, FTP, با صعود کردن, ddns, NTP, igmp, ICMP |
| پروتکل های سازگار | در حال حاضر |
| رابط | |
| رابط ارتباطی | 1 RJ45, 10رابط اترنت سازگار M/100m |
| ویژگی های اساسی | |
| دما/رطوبت عملیاتی | -35℃ ~+60 ℃ / < 90 ٪ RH |
| درجه حفاظت از PTZ | IP66 |
| ورودی برق | منبع تغذیه ضد آب AC220V به DC24V ± 15 ٪ |
| قدرت | عملکرد طبیعی ≤30W راه اندازی اوج 40W 40W |
| وزن (وزن خالص) | < 8 کیلوگرم |
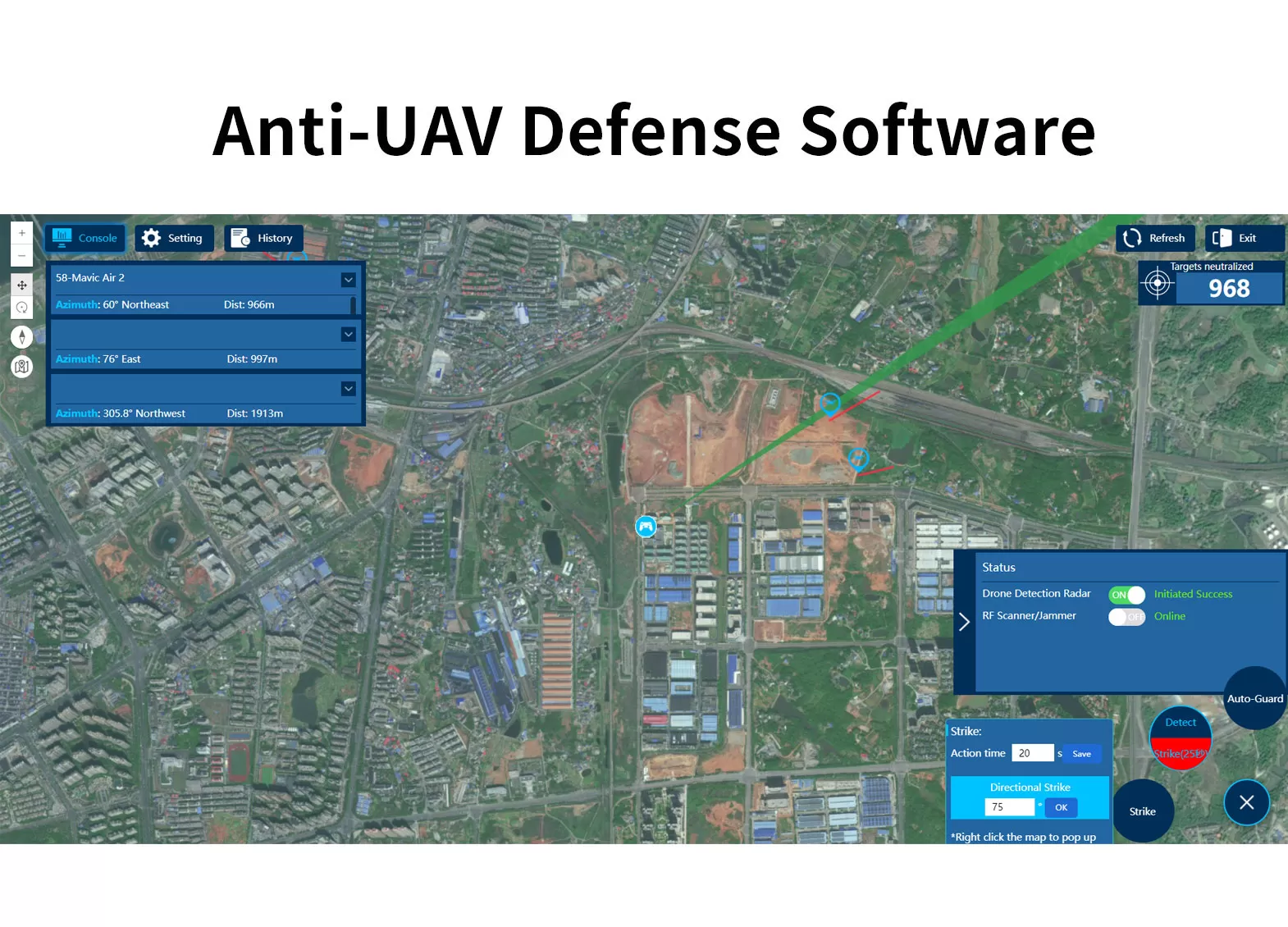
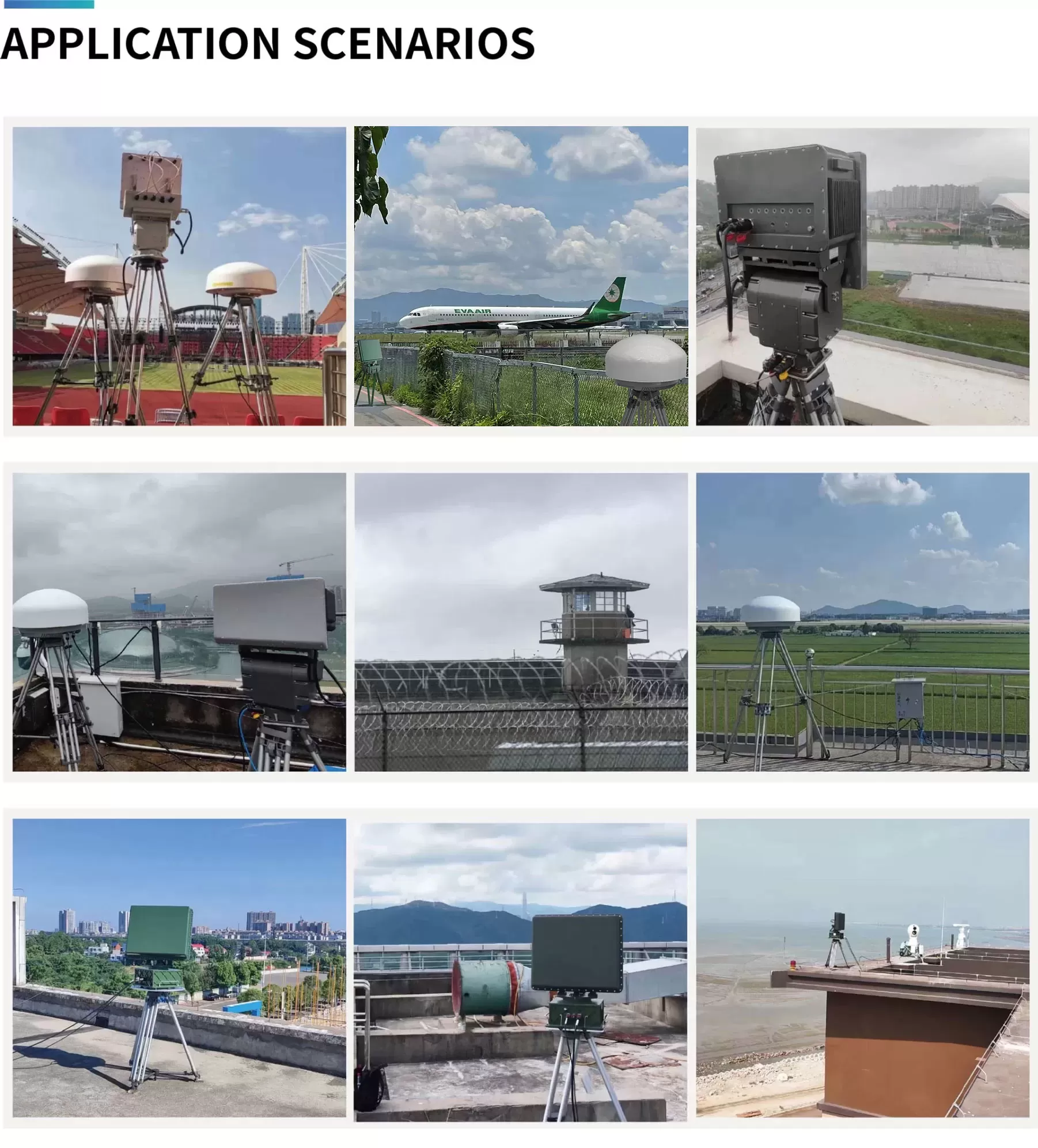
سیستم دفاعی ضد پهپاد از تجهیزات جلویی مانند رادار شناسایی تشکیل شده است, آشکارساز RF, دوربین ردیابی E/O, دستگاه پارازیت یا جعل RF و نرم افزار پلت فرم کنترل پهپاد. وقتی پهپاد وارد منطقه دفاعی می شود, واحد تشخیص اطلاعات موقعیت دقیق را از طریق فاصله فعال خروجی می دهد, زاویه, سرعت و ارتفاع. هنگام ورود به منطقه هشدار, سیستم به طور مستقل تعیین می کند و دستگاه پارازیت را راه اندازی می کند تا ارتباط پهپاد را مختل کند, به طوری که پهپاد را وادار به بازگشت یا فرود کند. این سیستم از چند دستگاه و مدیریت چند ناحیه پشتیبانی می کند و می تواند متوجه شود 7*24 نظارت بر آب و هوا و محافظت در برابر تهاجم هواپیماهای بدون سرنشین.
سیستم دفاعی ضد پهپاد از واحد تشخیص رادار یا RF تشکیل شده است, واحد ردیابی EO و واحد پارازیت. سیستم شناسایی هدف را یکپارچه می کند, ردیابی & به رسمیت شناختن, فرمان & کنترل پارازیت, چند عملکرد در یک. بر اساس سناریوهای مختلف برنامه, سیستم را می توان با انتخاب واحد تشخیص و دستگاه پارازیت مختلف به صورت انعطاف پذیر در یک راه حل بهینه مستقر کرد. AUDS را می توان نصب ثابت کرد, وسیله نقلیه سیار یا قابل حمل. بر اساس نوع نصب ثابت, AUDS به طور گسترده در سایت حفاظت از امنیت سطح بالا استفاده می شود, نوع سوار بر وسیله نقلیه معمولاً برای گشت زنی معمولی یا بیشتر استفاده می شود, و از نوع پرتابل برای پیشگیری موقت بسیار استفاده می شود & کنترل در کنفرانس کلیدی, رویداد های ورزشی, کنسرت و غیره.